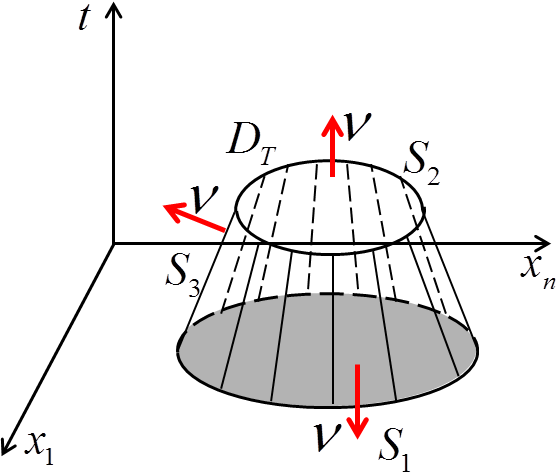
Характеристический конус
|
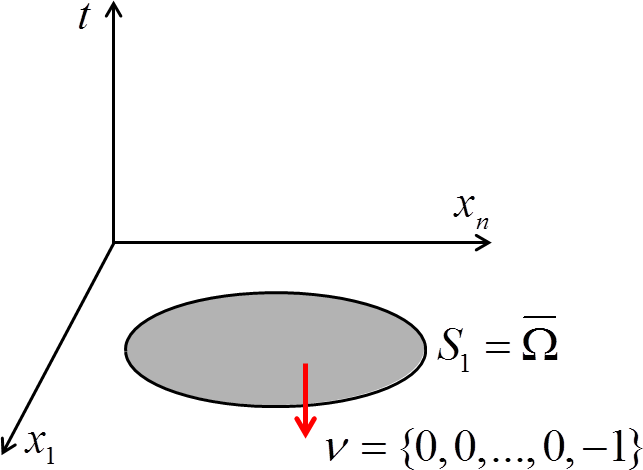
S1 = {(x, t): x ∈ S2 = {(x, t): |x − x0| ≤ a(t0 − T), t = T} S3 = {(x, t): 0 ≤ t ≤ T, |x − x0| = a(t0 − t)} |
|
|
|

17/24

|
S1 = {(x, t): x ∈ S2 = {(x, t): |x − x0| ≤ a(t0 − T), t = T} S3 = {(x, t): 0 ≤ t ≤ T, |x − x0| = a(t0 − t)} |
|
|
|