Индукционные преобразователи
Принцип действия индукционных преобразователей основан на явлении электромагнитной индукции, согласно которому величина наведённой в контуре ЭДС пропорциональна скорости изменения потокосцепления:
где потокосцепление \(Ψ=wΦ=wBS\); \(w\) — число витков катушки; \(Φ\) — проходящий через неё магнитный поток; \(S\) — площадь, через которую проходит этот поток; \(B\) — индукция магнитного поля. ЭДС в обмотке катушки может наводиться при изменении во времени любой из перечисленных величин: \(w,B,S\).Очевидно, что индукционные датчики относятся к классу генераторных преобразователей. В них происходит преобразование механической энергии в электрическую, например, при перемещении катушки с сердечником или без него в постоянном магнитном поле с индукцией \(B_{0}\). Индукционные преобразователи широко применяют для измерения линейных и угловых перемещений, частоты вращения, параметров вибрации, расхода жидких веществ. Их используют и для измерения параметров переменных магнитных полей.
В качестве примера рассмотрим преобразователь, представляющий собой постоянный магнит с полюсными наконечниками, в воздушном зазоре которого перемещается прямоугольная катушка с \(n\) витками. При движении катушки изменяется её площадь, находящаяся в магнитном поле с индукцией \(B_{0}\), \(S=bx\). Это приводит к изменению потокосцепления \(Ψ=nBbx\), и в катушке наводится ЭДС:
где \(v\) — линейная скорость перемещения катушки относительно полюсов магнита.
Варианты индукционных датчиков, называемых тахометрами и используемых для измерения частоты вращения валов, приведены на рисунке.
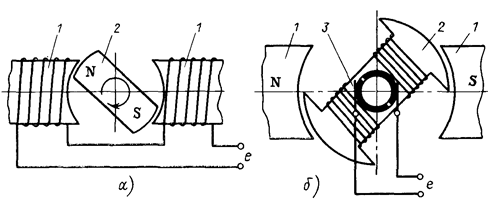
Преобразователь с вращающимся постоянным магнитом \(a)\) состоит из статора \(1\), на котором размещена обмотка, и ротора \(2\) с закреплённым на нём постоянным магнитом. При вращении магнита изменяется поток, проходящий через обмотку, и в ней индуцируется переменная ЭДС. Амплитуда и частота ЭДС пропорциональны частоте вращения ротора. Выбор в качестве информативного параметра частоты изменения ЭДС, которую можно измерить, например, с помощью цифрового частотомера, позволяет уменьшить погрешность измерений. В общем случае частота ЭДС определяется соотношением: \(f=np/60\), где \(n\) — частота вращения, об/мин; \(ρ\) — число пар полюсов.
На рисунке \(б)\) приведена схема тахометрического преобразователя, у которого статором \(1\) является постоянный магнит, а измерительная обмотка расположена на роторе \(2\). При его вращении образуется переменная ЭДС, которая снимается с вращающего ротора с помощью коллектора \(3\) и скользящих по нему щёток. Выходная ЭДС такого преобразователя равна:
где \(\Omega\) — круговая частота вращения катушки в постоянном магнитном поле с индукцией \(B\).
Погрешности индукционных преобразователей в значительной степени зависят от режима, в котором они работают. Если нагрузка индукционного преобразователя потребляет значительный ток, то его магнитное поле создаёт «размагничивающий эффект», приводящий к уменьшению ЭДС преобразователя. Вследствие этого уменьшается чувствительность преобразователя и его функция преобразования становится нелинейной, что приводит к погрешности. Непостоянство индукции тоже вызывает возникновение дополнительной погрешности.
