Принцип действия индуктивного датчика перемещений
Имеются два класса преобразователей: с изменяющейся индуктивностью и с изменяющимся активным сопротивлением. Пример схемы преобразователя первого класса показан на рис. \(1\)а.
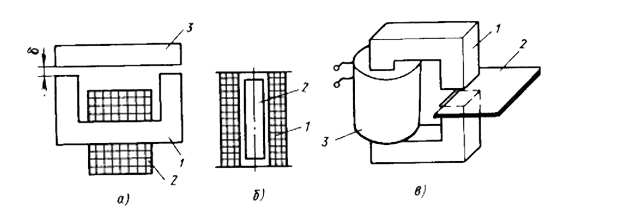
Рис. 1
Преобразователь состоит из П–образного сердечника (магнитопровода) \(1\), на котором размещена катушка \(2\), и подвижного якоря 3. При перемещении якоря изменяется длина воздушного зазора \(\delta\) и, следовательно, магнитное сопротивление, что вызывает изменение индуктивности катушки датчика, которая может быть зарегистрирована. Возможен вариант преобразователя, в конструкции которого якорь перемещается горизонтально относительно П–образного сердечника и изменяет эффективную площадь замыкания магнитного потока. Оба варианта датчика: и с переменным зазором, и с переменной площадью — относятся к датчикам с замкнутой магнитной цепью.
Другая широко используемая модификация первого класса относится к датчикам с разомкнутой магнитной цепью. Пример такого датчика, называемого соленоидным или плунжерным преобразователем, показан на рис. \(1\)б. Преобразователь представляет собой катушку \(1\), из которой может выдвигаться ферромагнитный сердечник \(2\) (плунжер). При среднем положении плунжера индуктивность максимальна. Этот тип преобразователя применяется для измерения значительных перемещений сердечника (до \(100\) мм).
Схема преобразователя второго класса приведена на рис. \(1\)в. В зазор магнитной цепи \(1\) вводится пластинка \(2\) с высокой электропроводностью, в которой наводятся вихревые токи, приводящие к увеличению потерь активной мощности катушки \(3\). Это приводит к изменению составляющих полного комплексного сопротивления катушки индуктивности, в частности, к увеличению её активного сопротивления, что тоже может быть зарегистрировано. Этот тип датчика будет рассмотрен в классе вихретоковых преобразователей.
Определим функцию преобразования датчика на примере преобразователя с переменным зазором (рис. \(1\)а). Как известно, индуктивность катушки \(L\) определяется соотношением: \(L=wФ/I\), где \(w\) — число витков; \(Ф\) — пронизывающий её магнитный поток; \(I\) — проходящий по катушке ток. С учётом \(Ф=Iw/Z_М\), получим:
где \(Z_м\) — полное сопротивление магнитному потоку, которое состоит из двух составляющих: магнитного сопротивления сердечника \(Z_{мс}\) и магнитного сопротивления воздушных зазоров \(R_3\). Если пренебречь рассеянием магнитного потока и нелинейностью кривой намагничивания сердечника (они будут учтены в форме потерь на вихревые токи и магнитный гистерезис как составляющие сопротивления потерь \(R_п\)), то
где \(R_C\) — суммарное магнитное сопротивление участков магнитопровода; l — длина средней силовой линии по участкам магнитопровода; \(S_C\) — их поперечное сечение; \(\mu\) — магнитная проницаемость материала сердечника; \(\mu_{0}=4\pi\cdot10^{-7}\)Гн/м — магнитная постоянная; \(\delta\) и \(S_3\) — соответственно длина и сечение воздушного зазора. Отсюда:
Так как \( S_C\approx S_3 = S_0\), а для удовлетворительной работы датчика требуется выполнение условия \(2\delta\gg l/\mu\), что достигается выбором для магнитопровода материала с большим значением магнитной проницаемости \(\mu\geq 10^3\), то окончательно получаем:
и полное комплексное сопротивление \(Z\) катушки запишется в виде:
Модуль полного комплексного сопротивления катушки индуктивности часто записывают в виде:
где Q \(= \omega L/R_П\) — добротность индуктивного датчика, характеризуемая отношением запасённой энергии в контуре к энергии рассеянной. Значения Q для разных сердечников такие — сталь: Q = \(1\) − \(4\); пермаллой: Q = \(3\) − \(10\); ферриты: Q = \(3\) − \(20\);
Из выражения (14.6) оценим чувствительность датчика с переменным зазором:
В ряде случаев чувствительность индуктивного преобразователя удобно характеризовать величиной:
из которой следует существенное возрастание чувствительности датчика с уменьшением протяжённости воздушного зазора \(\delta\). Из \((14.9)\) следует, что относительное изменение индуктивности датчика равно:
Последнее выражение позволяет оценить порог чувствительности индуктивных датчиков перемещений. Современные измерительные схемы и приборы позволяют измерить относительное изменение индуктивности \(\Delta L/L\) с точностью до \(0,1–0,01\) %, что соответствует относительному изменению зазора \(\Delta\delta/\delta\) = \(10^{-3} - 10^{-4}\). При номинальной величине зазора \(\delta_0\) = \(0,5\) мм минимальные перемещения, которые могут быть зарегистрированы, равны \(0,5 – 0,05\) мкм.

