1.4. Сложение колебаний одного направления
Может случиться так, что осциллятор принимает участие в двух одинаково направленных колебаниях с разными амплитудами, частотами и начальными фазами. Рассмотрим сложение таких колебаний.
Сложение колебаний с одинаковыми частотами
Для простоты рассмотрим сначала случай, когда частоты складываемых колебаний одинаковы. Общие решения складываемых гармонических колебаний имеют вид:
|
|
|
(1.34) |
где x1, x2 — переменные, описывающие колебания, A1, A2 — их амплитуды, а ![]() ,
, ![]() — начальные фазы. Результирующее колебание
— начальные фазы. Результирующее колебание
![]()
удобно найти с помощью векторной диаграммы. Этот метод использует аналогию между вращением и колебательным процессом.
Возьмем общее решение (1.23) для гармонического колебания. Выберем ось 0x. Из точки 0 отложим вектор длиной A, образующий с осью 0x угол ![]() . Если привести этот вектор во вращение с угловой скоростью
. Если привести этот вектор во вращение с угловой скоростью ![]() , то проекция конца этого вектора будет перемещаться по оси 0x от +A до –A, причем величина проекции будет изменяться по закону
, то проекция конца этого вектора будет перемещаться по оси 0x от +A до –A, причем величина проекции будет изменяться по закону
|
|
|
(1.35) |
Таким образом, проекция конца вектора на ось 0x будет совершать гармонические колебания с амплитудой, равной длине вектора, с круговой частотой, равной угловой скорости вращения вектора, и с начальной фазой, равной углу, образуемому вектором с осью в начальный момент времени (рис. 1.12).
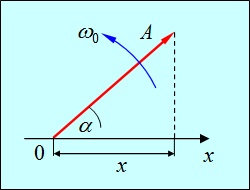
Рис. 1.12. Векторная диаграмма для общего решения (1.23)
Применим теперь эту технику к сложению колебаний (1.34). Представим оба колебания с помощью векторов А1 и А2 Возьмем их векторную сумму (рис. 1.13)
![]()

Рис. 1.13. Векторная диаграмма для сложения одинаково направленных колебаний одинаковой частоты
Проекция вектора А1 на ось 0x равна сумме проекций соответствующих векторов
![]()
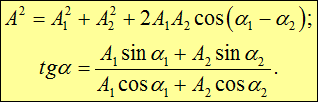
Таким образом, вектор А представляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью ![]() , так что результирующее движение будет гармоническим колебанием с частотой
, так что результирующее движение будет гармоническим колебанием с частотой ![]() , амплитудой A и начальной фазой a. Согласно теореме косинусов:
, амплитудой A и начальной фазой a. Согласно теореме косинусов:
|
|
|
(1.36) |
В частности, если фазы складываемых колебаний равны или отличаются на величину, кратную ![]() (то есть
(то есть ![]() ), то амплитуда результирующего колебания равна сумме амплитуд
), то амплитуда результирующего колебания равна сумме амплитуд
![]()
Если же складываемые колебания находятся в противофазе (то есть ![]() ), то
), то
![]()
Биения
В этом разделе мы рассмотрим случай сложения одинаково направленных гармонических колебаний с разными частотами. На практике особый интерес представляет случай, когда складываемые колебания мало отличаются по частоте. Как мы увидим, в результате сложения этих колебаний получаются колебания с периодически изменяющейся амплитудой, называемые биениями.
|
Биения — это периодическое изменение амплитуды колебаний, возникающее при сложении двух гармонических колебаний с близкими частотами. |
Для простоты рассмотрим случай, когда амплитуды складываемых колебаний равны A, а начальные фазы обоих колебаний равны нулю. Частоты складываемых колебаний равны, соответственно, ![]() и
и ![]() . Итак,
. Итак,
|
|
|
(1.37) |
Складываем эти выражения и учитываем известную формулу тригонометрии:
|
|
|
(1.38) |
Если ![]() то в аргументе второго косинуса мы можем пренебречь сдвигом частоты:
то в аргументе второго косинуса мы можем пренебречь сдвигом частоты:
|
|
|
(1.39) |

Кроме того, множитель в скобках меняется медленно по сравнению с ![]() . Поэтому результирующее колебание x можно рассматривать как модулированное гармоническое колебание с частотой w, эффективная амплитуда
. Поэтому результирующее колебание x можно рассматривать как модулированное гармоническое колебание с частотой w, эффективная амплитуда ![]() которого изменяется со временем по закону (1.40) (рис. 1.14):
которого изменяется со временем по закону (1.40) (рис. 1.14):
|
|
|
(1.40) |
Подчеркнем, что в строгом смысле такое колебание не является гармоническим, и еще раз напомним, что, согласно определению, колебание гармоническое, если оно происходит по закону ![]() , причем все три его параметра:
, причем все три его параметра: ![]() строго постоянны во времени.
строго постоянны во времени.

Рис. 1.14. Биения при сложении колебаний с близкими частотами
Частота пульсаций амплитуды (ее называют частотой биений) равна разности частот складываемых колебаний. Период биений равен
|
|
|
(1.41) |

Видео 1.12 Биения на экране осциллографа
Видео 1.13 Биения: осциллограф и динамик
Видео 1.14 «Двойной» маятник: запись песком картины биений
Колебания двух связанных осцилляторов
Приведем поучительный пример системы, в которой возникают биения. Рассмотрим два груза массой m, которые могут колебаться под действием двух одинаковых пружин с коэффициентами жесткости k. Пусть грузы соединены также мягкой пружиной с коэффициентом жесткости K<<k. Будем полагать длины всех пружин в нерастянутом состоянии одинаковыми и равными 2L (рис. 1.15).
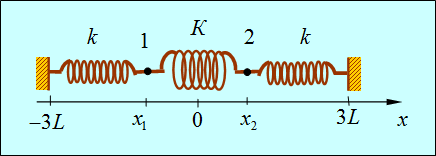
Рис. 1.15. Пример связанных осцилляторов.
Колебания происходят вдоль оси 0х, сила тяжести не учитывается
Тогда в положении равновесия координаты грузов равны

При колебаниях координаты равны, соответственно, x1(t), x2(t). Удлинения пружин записываются как
Мы имеем дело с системой с двумя степенями свободы. Составим уравнения движения. На первый груз действуют сила со стороны пружины k, равная
![]()
и сила со стороны пружины K, равная
![]()
На второй груз действуют аналогичные силы
![]()
и
![]()
Соответственно, уравнения движения имеют вид
|
|
|
(1.42) |
Эти уравнения не слишком похожи на первый взгляд на уравнения гармонических колебаний, потому что на колебания x1 оказывают влияния колебания x2 и наоборот. Поэтому преобразуем уравнения к новым переменным, уравнения для которых были бы независимыми (такие переменные называют нормальными координатами, а соответствующие им колебания — нормальными колебаниями (модами)). Именно, введем новые переменные x1 и x2:
|
|
|
(1.43) |
Как легко убедиться, положениям равновесия соответствуют нулевые значения этих координат
![]()
В этих переменных уравнения (1.42) принимают вид:
|
|
|
(1.44) |
Складывая и вычитая эти уравнения, приходим к паре независимых уравнений для введенных нормальных координат:
|
|
|
(1.45) |
Первое уравнение описывает гармонические колебания с частотой

совпадающей с частотой колебаний пружинных маятников в отсутствие соединительной пружины К. Второе уравнение описывает колебания со сдвинутой частотой
Так как K<<k, имеем
|
|
|
(1.46) |
Соответственно, мы получаем общее решение системы уравнений:
|
|
|
(1.47) |
Общее решение для координат х1 и х2 колеблющихся точек следуют из (1.47) и (1.43):
|
|
|
(1.48) |

Для примера рассмотрим случай, когда первая масса смещается на расстояние ![]() от положения равновесия и отпускается с нулевой начальной скоростью, а вторая масса остается в положении равновесия:
от положения равновесия и отпускается с нулевой начальной скоростью, а вторая масса остается в положении равновесия:
|
|
|
(1.49) |
Этому соответствуют следующие начальные значения нормальных координат:
|
|
|
(1.50) |
Такие начальные условия уже рассматривались выше. Соответствующие им решения имеют вид
|
|
|
(1.51) |
Подставляя найденные амплитуды и начальные фазы в (1.48), получаем решения, описывающие колебания рассматриваемых масс около их положений равновесия:
|
|
|
(1.52) |
Графики функций x1(t), x2(t) показаны на рис. 1.16. Видна характерная картина биений.
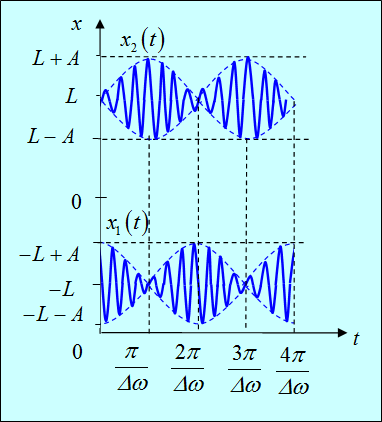
Рис. 1.16. Биения в системе двух связанных осцилляторов
В начальный момент времени колеблется лишь первый груз. Затем начинает колебаться второй, а амплитуда колебаний первого уменьшается. Через время ![]() первый груз останавливается, а второй колеблется с максимально возможной амплитудой. Произошла «перекачка» энергии от первого маятника ко второму. Затем процесс «перекачки» энергии идет в обратном направлении и к моменту
первый груз останавливается, а второй колеблется с максимально возможной амплитудой. Произошла «перекачка» энергии от первого маятника ко второму. Затем процесс «перекачки» энергии идет в обратном направлении и к моменту ![]() первый маятник колеблется с максимальной амплитудой, а второй покоится.
первый маятник колеблется с максимальной амплитудой, а второй покоится.
На рис. 1.17 демонстрируются биения в системе двух связанных математических маятников.
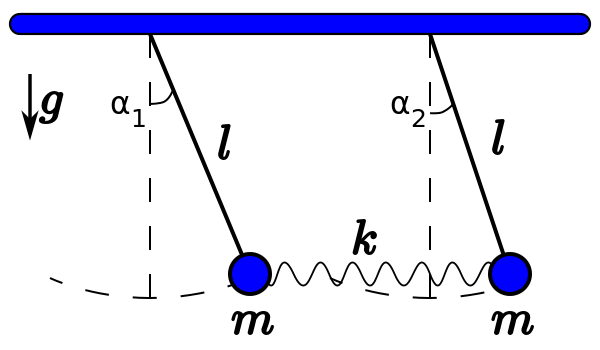
Рис. 1.17. Биения в системе связанных маятников
Выясним теперь физический смысл нормальных мод, соответствующих чисто гармоническим колебаниям системы. Если возбуждены колебания только первой из них (x1), то A2 = 0 и, как следует из общего решения (1.48),
|
|
|
(1.53) |
Из (1.53) видно, что первая нормальная мода соответствует такому колебанию, когда оба груза смещаются на одинаковые расстояния от их положений равновесия, но в противоположные стороны, другими словами — они колеблются в противофазе. Скорости движения грузов также равны по величине и противоположны по направлению, так что центр масс грузов остается неподвижным. Колебания происходят под действием пружин с жесткостью k, к которым добавляется соединительная пружина с жесткостью К. Как следствие, частота таких колебаний больше частоты колебаний несвязанных осцилляторов
Возбуждение только второй (x2) нормальной моды означает, что A1 = 0:
|
|
|
(1.54) |
В этом случае грузы смещаются из положения равновесия в одну сторону на одинаковые расстояния, другими словами – они колеблются синфазно. Скорости их также одинаковы по величине и направлению. Соединительная пружина колеблется вместе с грузами, но остается не растянутой и потому не оказывает влияния, так что частота колебаний совпадает с частотой колебаний несвязанных маятников.
В разобранном случае мы познакомились с нормальными модами и выяснили, что их частоты сдвигаются по сравнению с частотами колебаний несвязанных маятников. Любое другое колебательное движение системы можно представить как суперпозицию нормальных мод. Аналогичным образом можно рассмотреть цепочку из множества связанных друг с другом осцилляторов и изучить их нормальные колебания. Такая система представляет собой модель кристаллической решетки.
Дополнительная информация
http://allphysics.ru/feynman/bieniya — Фейнмановские лекции по физике. Биения.

